Double robot d’exploration planétaire.
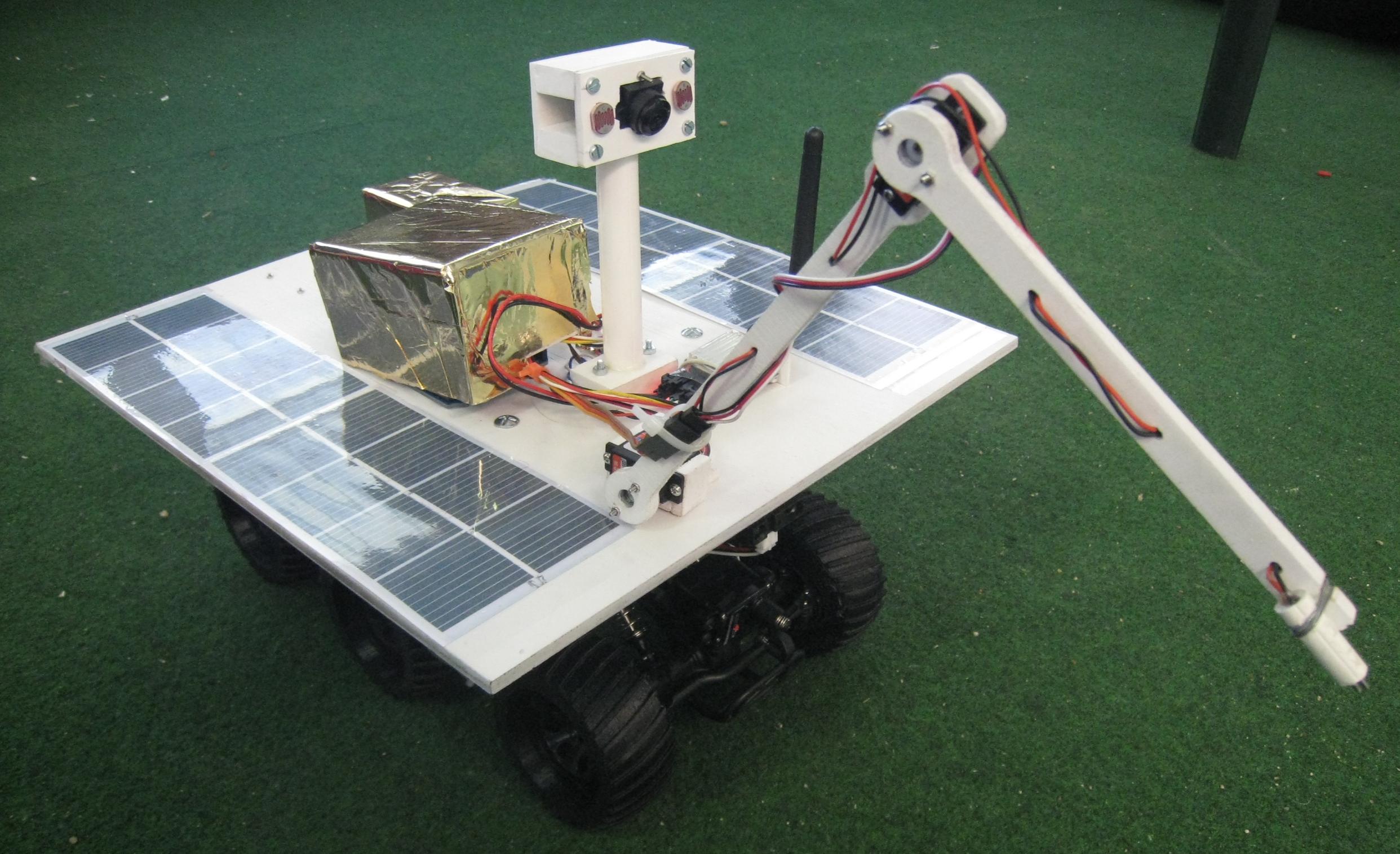
Le robot réel :
- dimension = 40 cm x 30 cm x 30 cm
- 6 roues, 4 roues motrices, 2 roues avant directrices
- caméra avec retransmission sur PC
- capteurs d’obstacles
- bras articulé avec un capteur
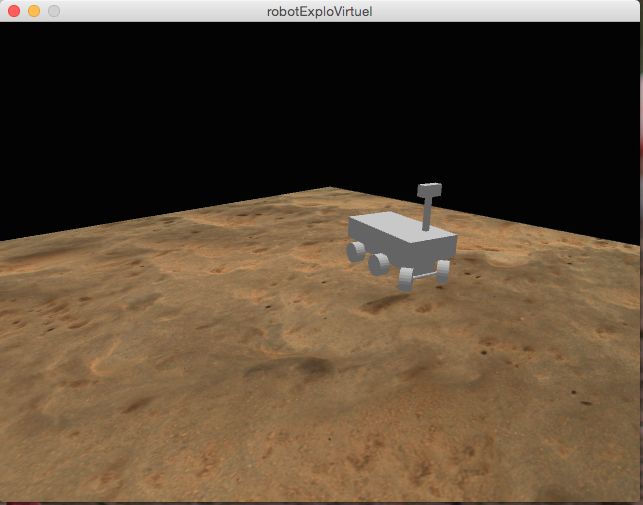
Le robot virtuel :
- caractéristiques à l’identique du robot réel
- monde virtuel plat avec vue 3D
- obstacles et éléments interagissants avec le robot
Programmation :
- arduino pour le robot réel
- processing pour le robot
- en C++/Java ou graphiquement avec nos blocks

Intérêt du double robot :
- les enfants programment d’abord le robot virtuel. Une fois le programme au point, ils l’envoient alors vers le robot réel.
- avec 1 seul robot physique, on peut animer un groupe de 12 enfants par exemple car ils peuvent tous programmer en virtuel. Il faut juste gérer l’utilisation du robot physique chacun son tour.
[row]
[column lg= »6″ md= »12″ sm= »12″ xs= »12″ ]
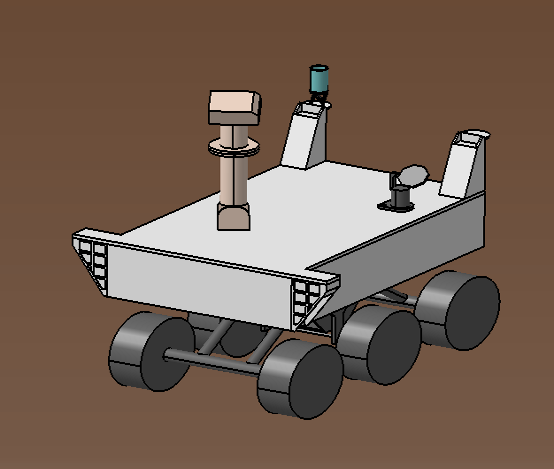
Travail en cours :
- re-conception du robot : nouveaux capteurs et nouveau look
- programmation de l’environnement virtuel
- écriture des scénari pédagogiques
Contact : demander JF Parmentier à l’association