
Construction du véhicule
Objectifs de cette étape :
- Réaliser les différentes parties du véhicule,
- Enregistrer les difficultés et réponses apportées tout au long du projet.
1. Processus de fabrication
Les cartes électroniques, après avoir été conçues grâce à KiCAD ont été commandées chez un fabriquant spécialisé. Pour réaliser ce projet, l'ensemble des cartes coûte environ 125€, principalement à cause de la carte principale, relativement grande.
Une fois ces cartes réceptionnées, il a fallu les souder. Pour cela j'utilise la technologie de la soudure à l'air chaud : une seringue permet de déposer de la pâte contenant des billes d'étain puis un pistolet à air chaud permet de faire fondre cette pâte pour réaliser la soudure. Cette méthode permet de travailler à une température non destructive pour les composants ( 260°C ) tout en assurant une grande précision dans le placement.
La carte est ainsi assemblée petit à petit, en commençant par des alimentations de faible puissance et avec un minimum de composant. Cela permet de s'assurer du bon fonctionnement de chaque système et, si un problème se déclare, cela permet de l'isoler bien plus vite.
2. Développement logiciel
L'intelligence d'Octocar est dirigée par un microcontrôleur STM32L4 : puissant et consommant peu d'énergie, nécessite de surveiller de nombreux paramètres et de déclencher de nombreuses actions. Dans la mesure où l'architecture d'Octocar est entièrement personnalisée, il est donc nécessaire de développer un logiciel complet.
Celui-ci est réalisé en langage C++ via une bibliothèque actuellement en phase de prototypage.
La plupart des algorithmes de contrôle sont connus, il ne devrait donc pas y avoir de difficulté à réaliser le programme minimal permettant de contrôler la voiture. La qualité du résultat final dépendra cependant du développement de certaines options…
Le développement de systèmes électroniques nécessite aussi un certain nombre d'équipements…
Comme le montre la photo ci-dessous, j'ai mis à contribution l'ensemble du materiel dont je dispose : alimentation stabilisée, oscilloscope, générateur de fonctions, sonde de programmation, station de soudure et ordinateur !
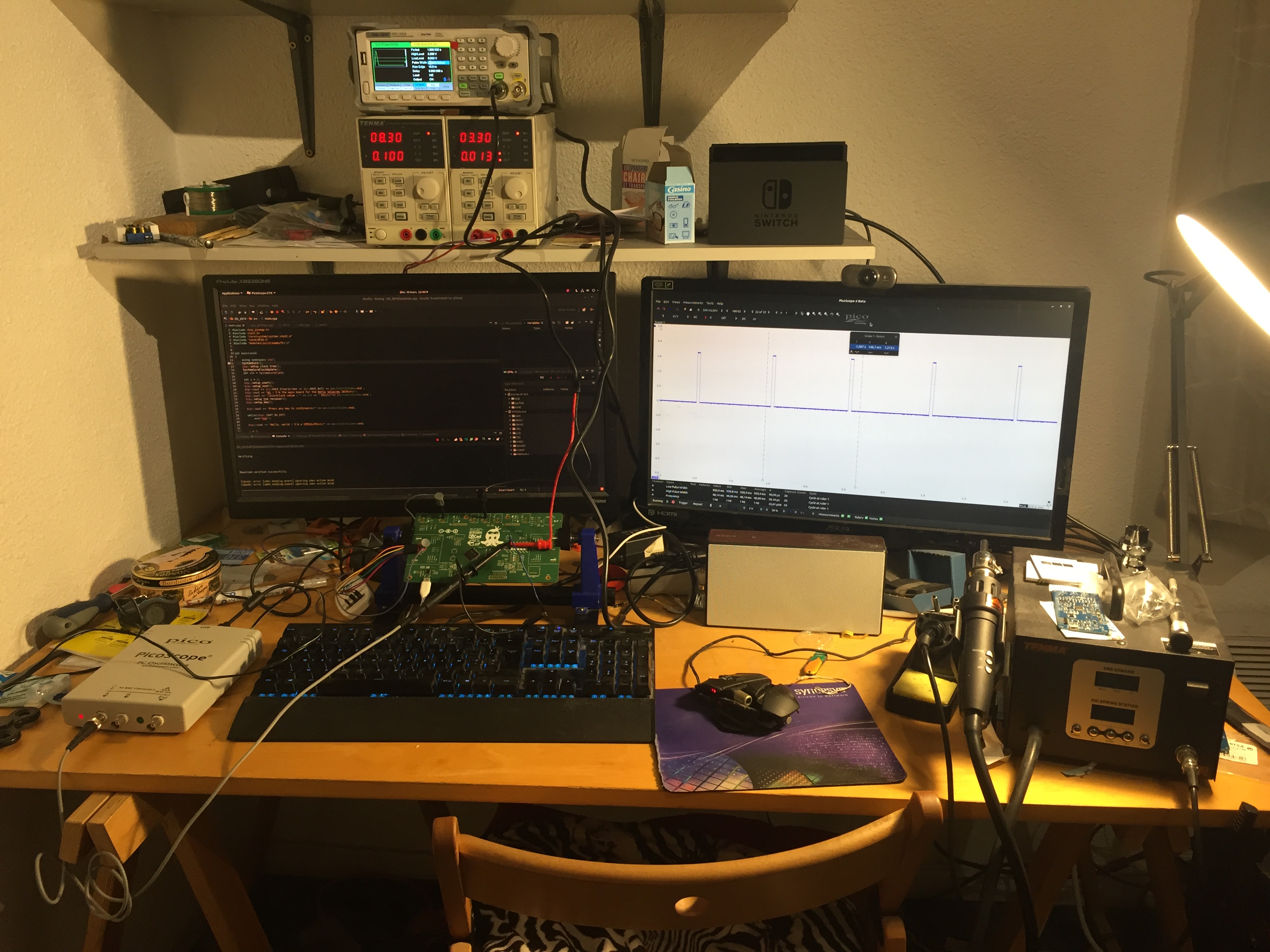
Espace de travail lors de la programmation de la carte électronique
3.Avancement
La carte est correctement soudée, prête à fonctionner. Cependant une petite erreur s'est glissée dans la conception de la carte principale qui m'impose de faire refabriquer mes modules moteurs. Ce problème mis à part, tout fonctionne comme prévu.
Aujourd'hui, le fonctionnement est vérifié pour :
- La lecture des entrées de radiocommande,
- La lecture de la position des codeurs et la commande des moteurs,
- L'interface de puissance entre la logique et un moteur.

Carte principale assemblée, avec les deux interfaces logique vers puissance
Les derniers tests ont été concluant dans le cadre du pilotage des moteurs. Ils sont pilotés correctement de plus, la consommation de la carte de conversion logique vers puissance est totalement négligeable. Cet objectif majeur a été atteint !
Maintenant que les expérimentations ont été finies, il ne reste plus qu'à réaliser proprement le code et implémenter l'ensemble des fonctions.