Définition et validation du protocole
de conception du véhicule
Objectifs mécaniques :
1. Objectifs
- Faire un bloc moteur alu
- Alléger de façon significative la structure Alu, sans trop modifier les dimensions du plateau où vont venir se fixer les cartes éléctroniques
- Point important: Supprimer tous les jeux dans la direction
- Mettre un amortisseur plus raide
- Mettre un sauve servo
- Mettre des tiges filetées à droite/ à gauche réglables plus facilement
- Vous pouvez donner libre cours à votre créativité
- On souhaite aussi un deuxième bloc moteur, de rechange, avec une courroie et un rapport de réduction de 2. Pour l’épreuve de slalom, notre voiture est trop rapide, et donc difficilement pilotable car elle prend trop de vitesse
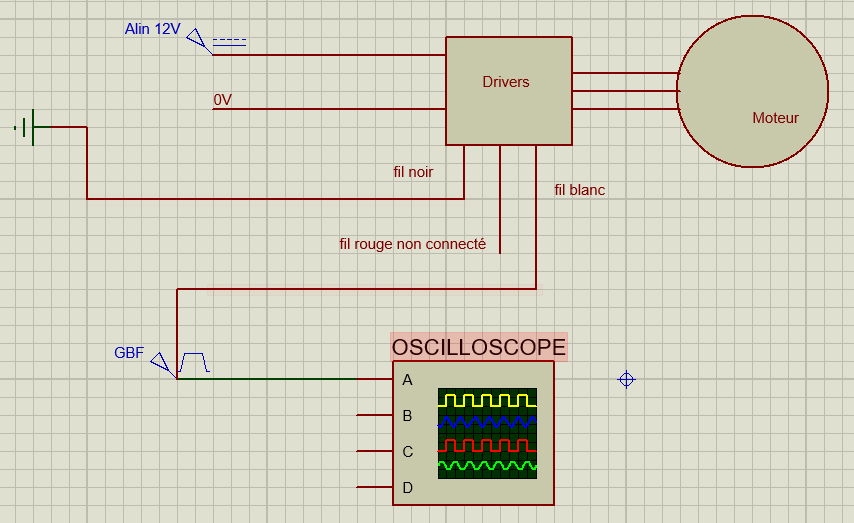
Vitesse du moteur

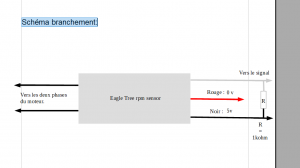
Schéma du branchement:
Démarrage du moteur :
Démarrage à 1,558 ms
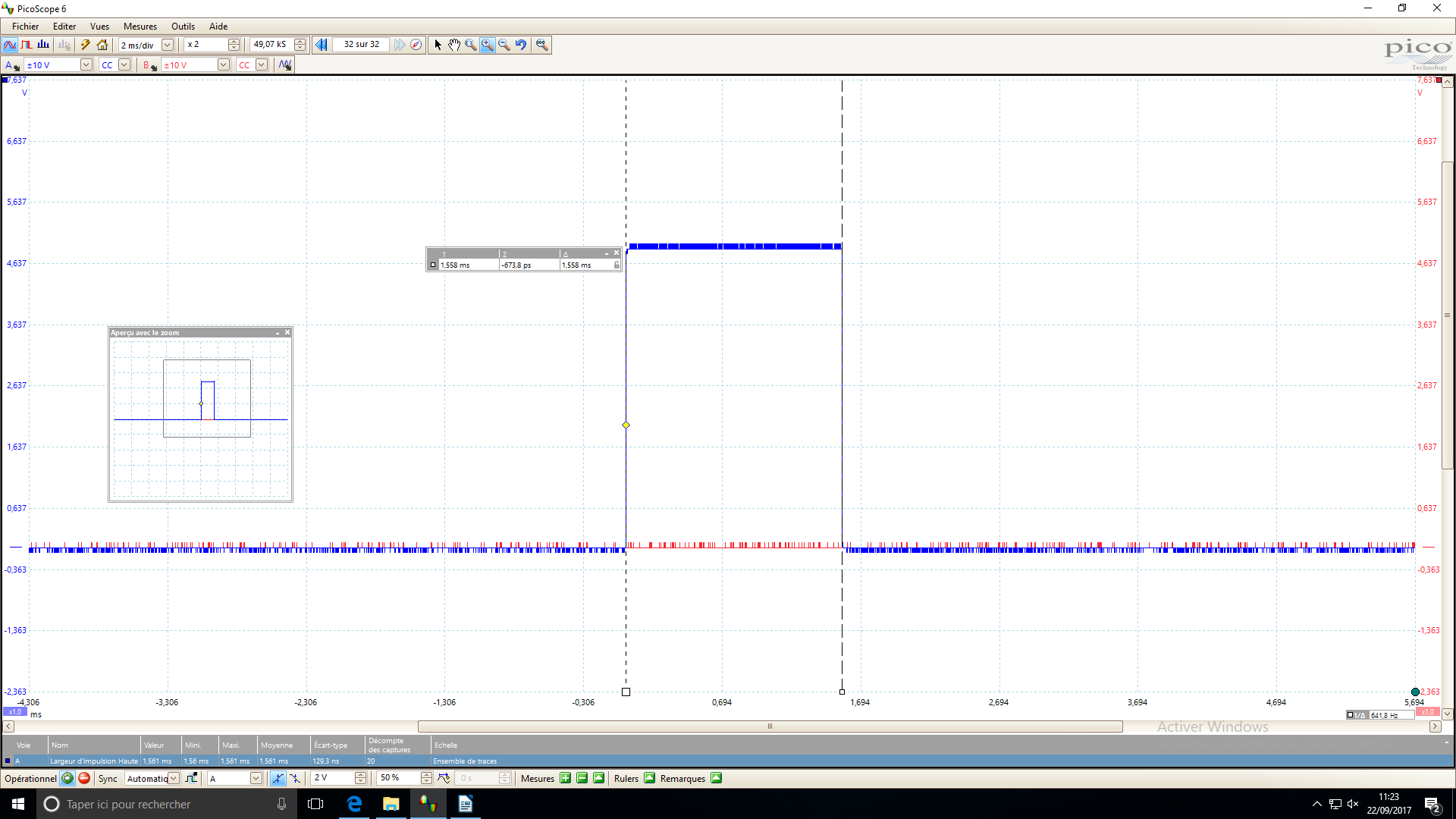
Fréquence: 160Hz
Insertion d’un indicateur de charge
Schéma de câblage:
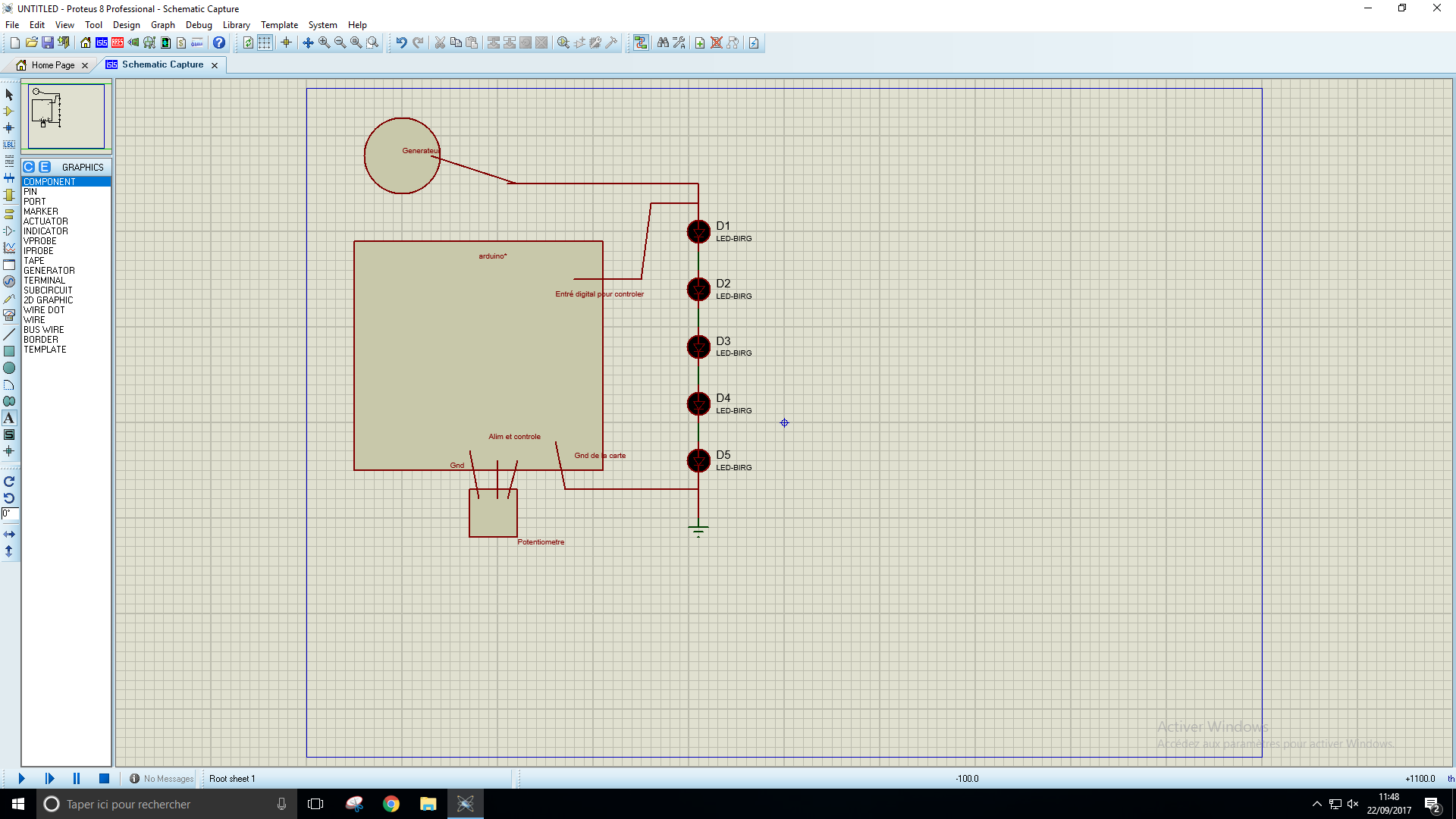
-Utilisation d’un potentiomètre pour simuler la décharge de la batterie (image 1)
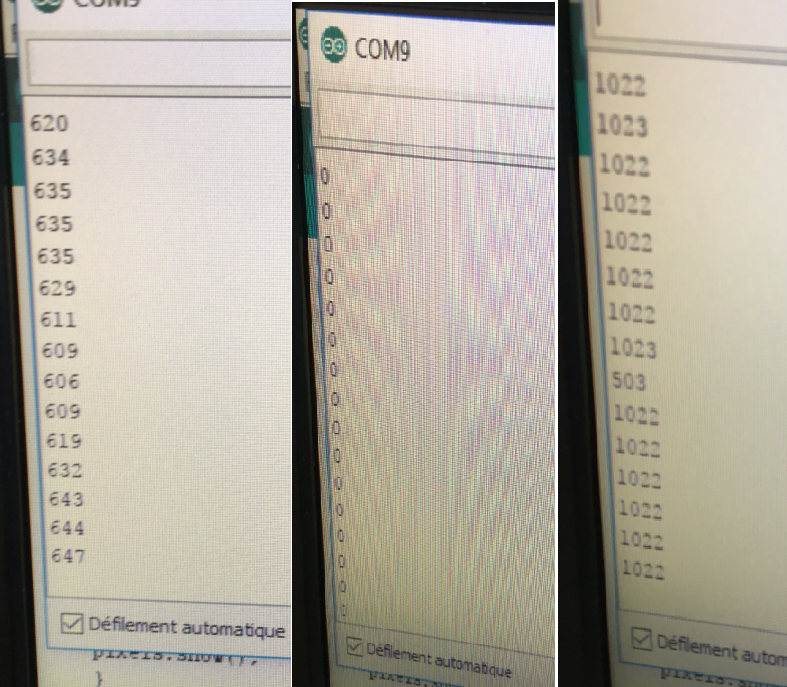
-Utilisation du moniteur série pour savoir quelle valeur est renvoyée par le potentiomètre (image 2)
-Utilisation d’une Arduino Nano (image 3)
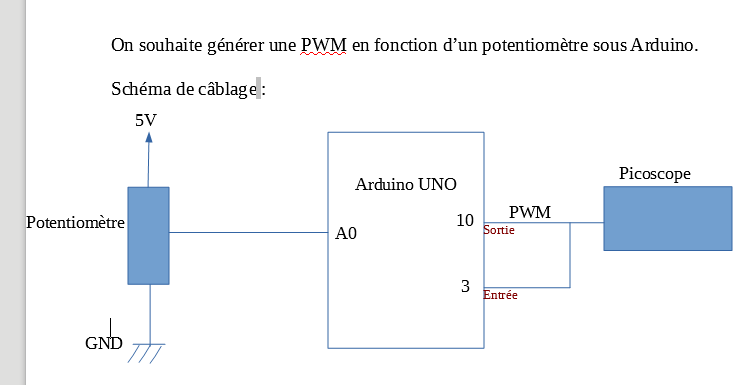
Génération d’une PWM en fonction d’un potentiomètre sur Arduino
Schéma de câblage:
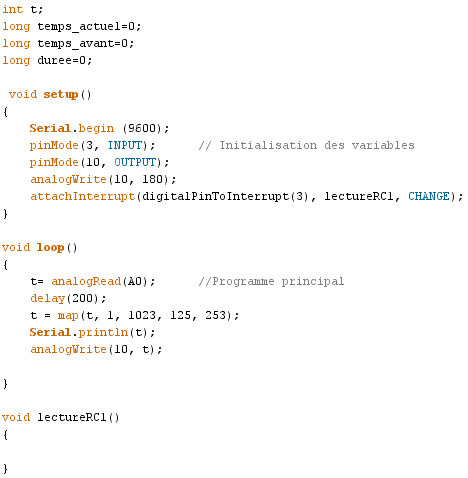
Arduino code (dans un premier temps):
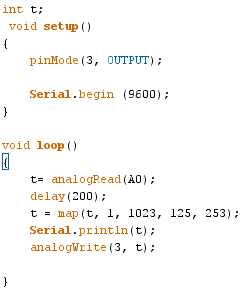
=> Ce programme permet d’obtenir la valeur en direct du potentiomètre.
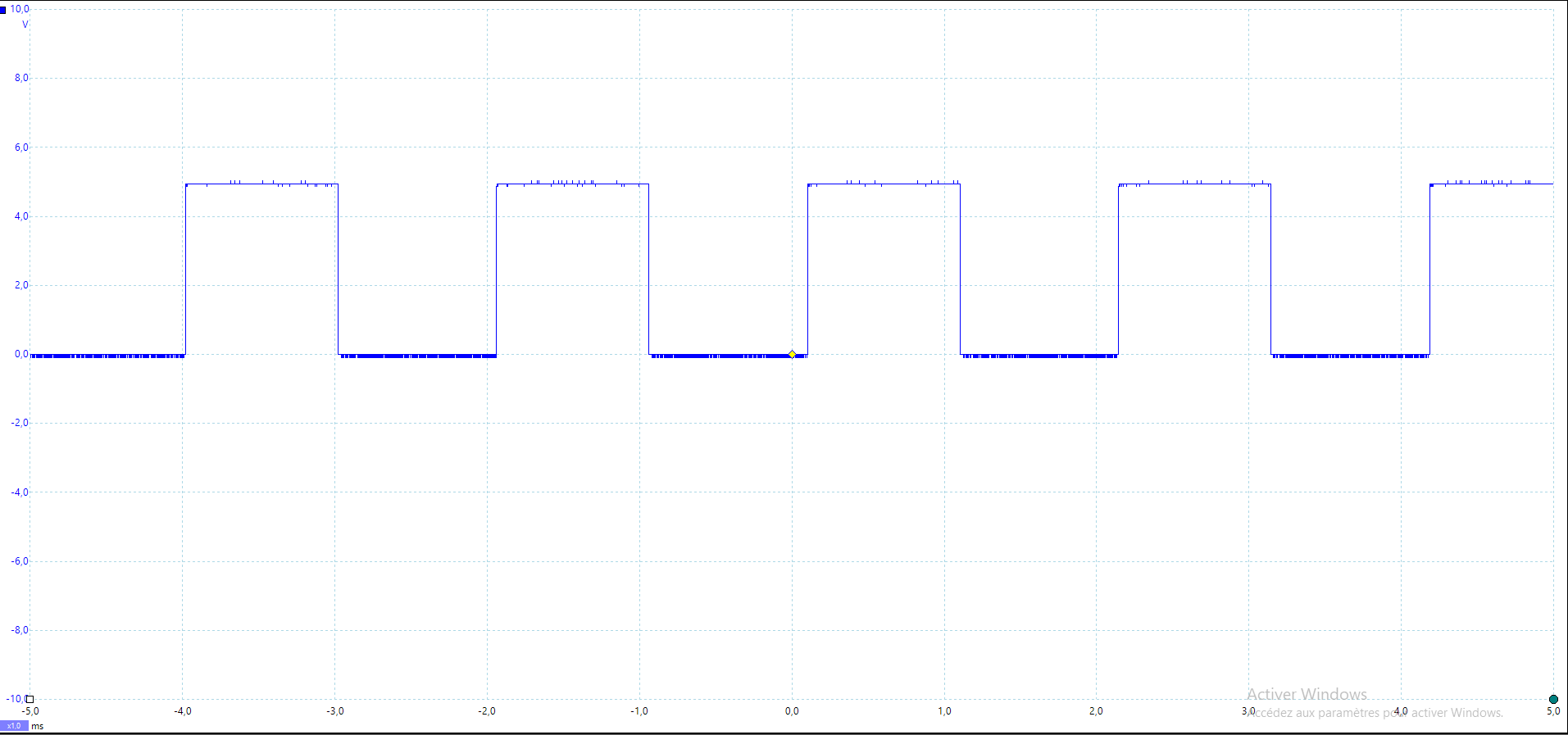
Ensuite on branche un picoscope à l’arduino et on modifie un peux le programme tel quel:
Avec cela on va pouvoir avoir un relevé de PWM en signal carré, propre :
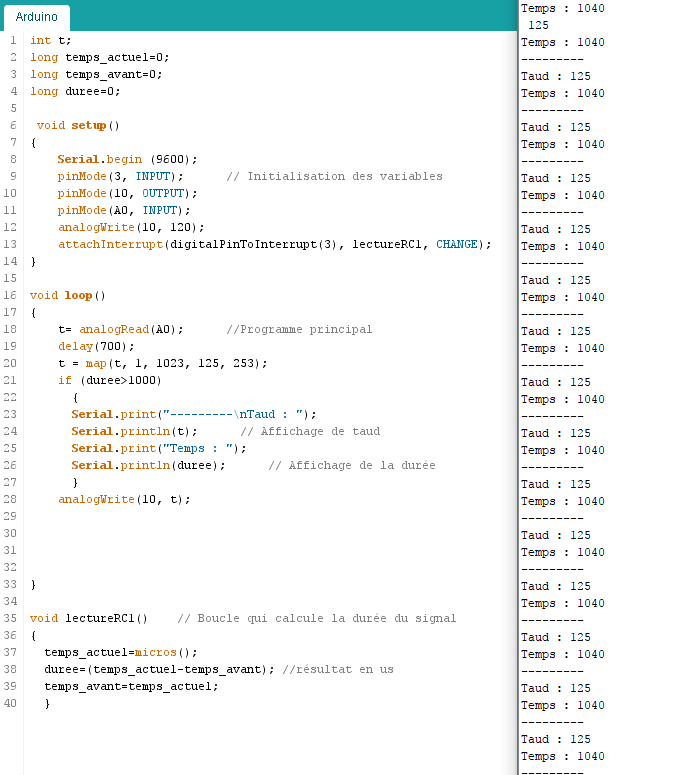
Ensuite on rajoute des lignes de code dans la partie « void lectureRC1 »
Voici le programme final avec le relevé de taud et de la durée :
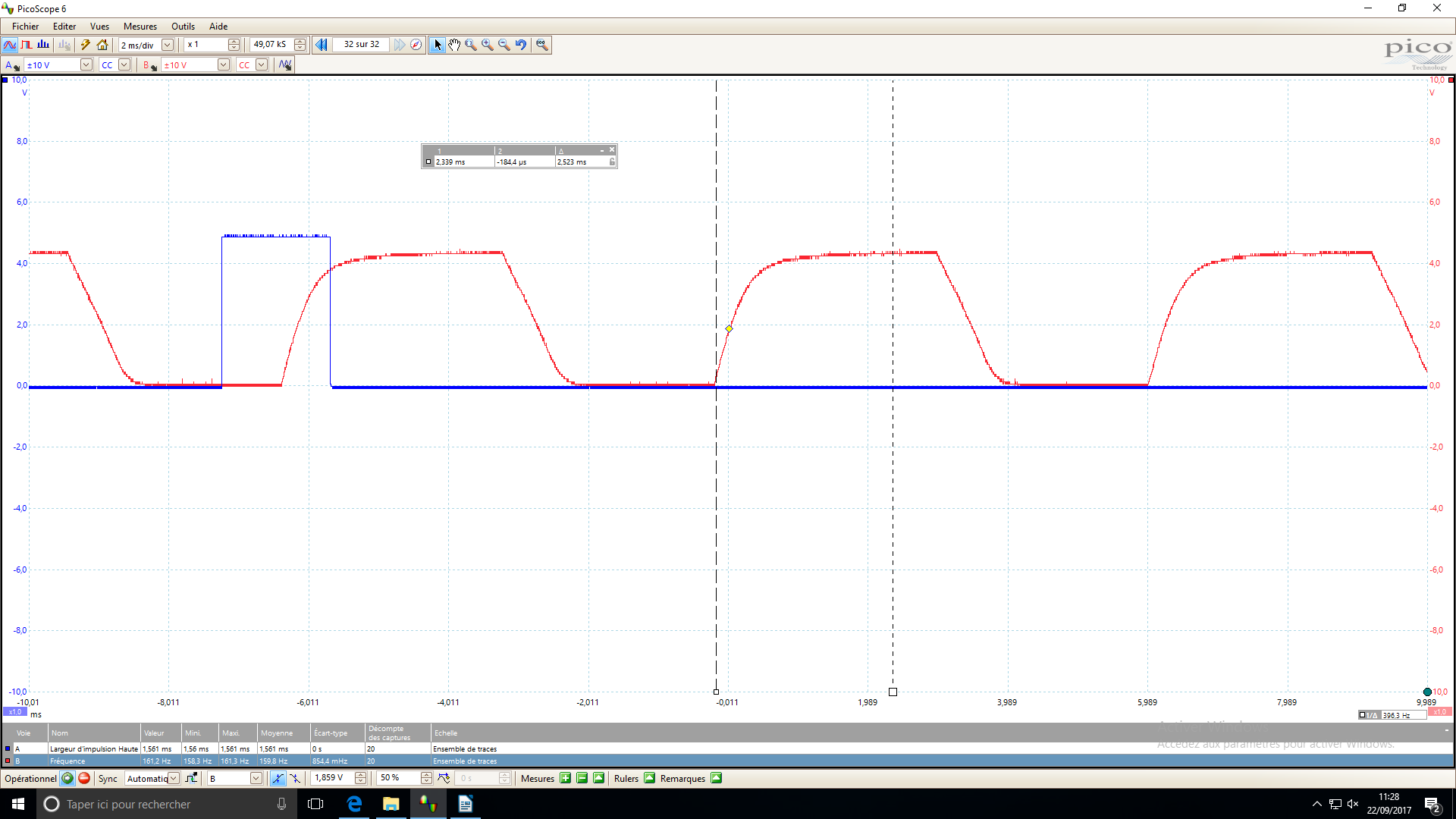
Relevé du signal et résultat expérimentaux
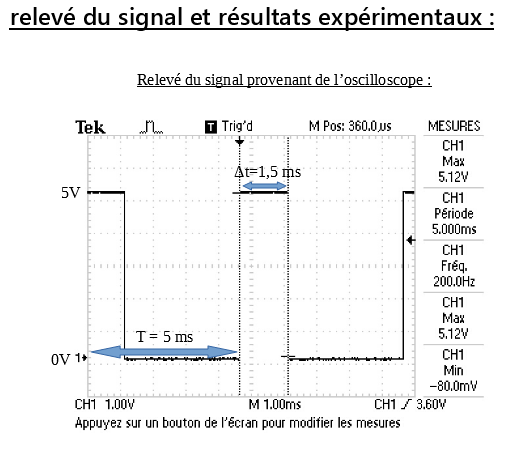
Pour une fréquence de 200 Hz et une alimentation de 12V:
Quand Δt = 1,5ms , le moteur s’initialise.
Quand Δt > 1,56ms , le moteur tourne.
Quand Δt < 1,46ms , le moteur tourne en marche arrière
Modélisation du câblage: