
Présentation du Cahier des charges
Lancement du projet
Objectifs de cette étape :
- Identifier les représentations des élèves sur les énergies renouvelables en particulier l’énergie solaire et photovoltaïque ;
- Poser la/les questions essentielles de l’opération ;
- Lancer la réflexion auprès des élèves sur les différentes pistes de constructions du véhicule après lecture du cahier des charges.
Objectifs de l'année
Cette année, l'objectif est de poursuivre le développement commencé l'année dernière, de repenser les défauts de conception, et d'apporter plus de soin à la conception sur la base des échecs de l'an dernier.
Points critiques
L'année dernière, tout le développement ne s'est pas déroulé comme prévu. Notamment à cause d'un manque de rigueur lors de la conception de l'électronique. Nous avons identifié les problèmes suivants :
- Problème de planification : moins de travail fourni que prévu et donc 3 mois de retard
- Problèmes de réalisation des connecteurs
- Problèmes de routage : l'assignation prévue des pattes de certains composants ne correspondait pas avec le composant réel
- Problème de puissance de calcul : la puissance du micro-contrôleur choisi était assez limitée.
Solutions de l'année
Afin de remédier à ces soucis, nous avons mis en place diverses solutions :
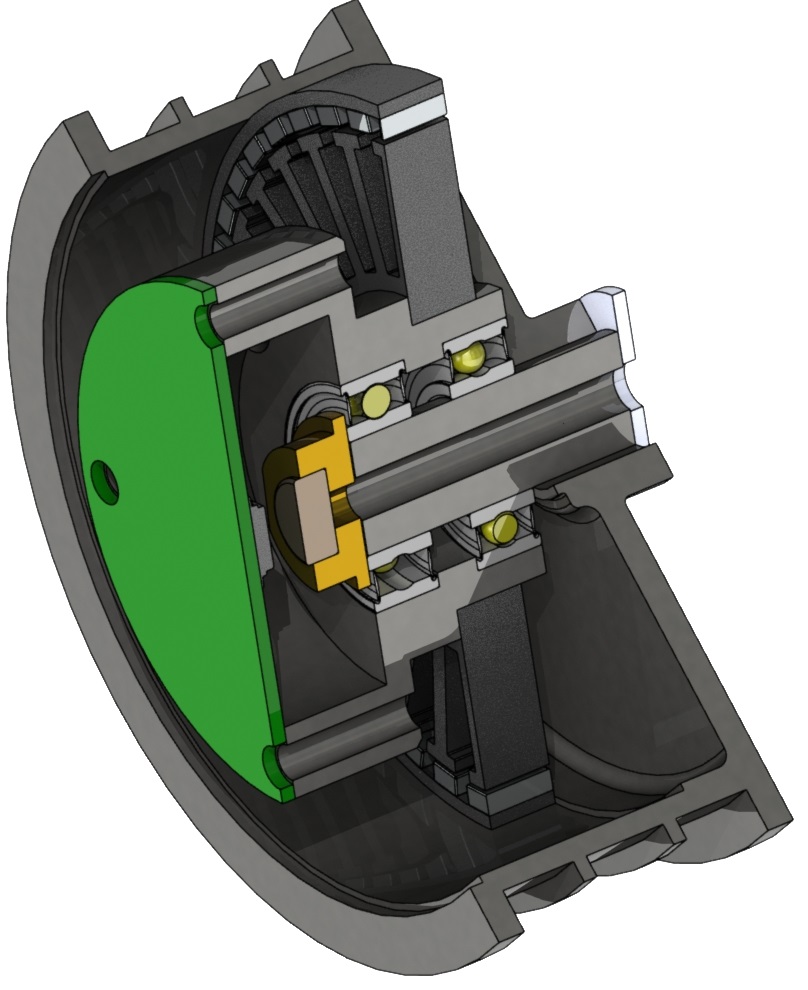
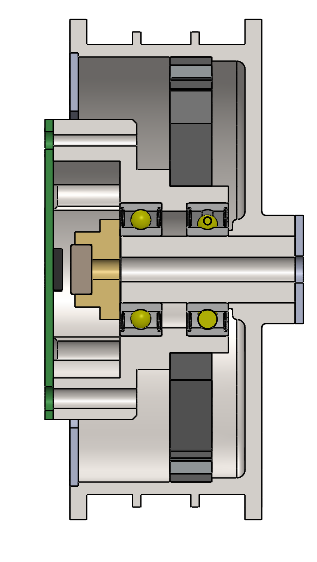
- Réutilisation du travail effectué l'année dernière : toute la mécanique est quasiment prête ce qui nous donne quelques mois d'avance
- Élimination de la très grande majorité des connecteurs transportant es signaux par l'utilisation d'une carte tout-en-un regroupant logique et puissance. Les connecteurs restants seront réalisés via des nappes de fils et des connecteurs perforants.
- Vérification systématique, lors du choix des composants pour l'achat, des pins des composants réels.
- Changement de micro-contrôleur.
Fonctionnalités
Nous retrouverons donc nos moteurs faits main de l'an dernier qui ont été testés.
Nous utiliserons un micro-contrôleur STM32F072 cadencé à 48MHz, soit plus du double de la vitesse de l'ATMega, basé sur une architecture ARM 32bits, et alimenté en 3.3V.
Ainsi, grâce à cette puissance de calcul supplémentaire, nous pouvons envisager de la télémétrie ! Sur le prototype développé, l'interface de cette télémétrie est entièrement gérée par la carte de commande : il suffit d'un terminal série correctement configuré sur l'ordinateur.
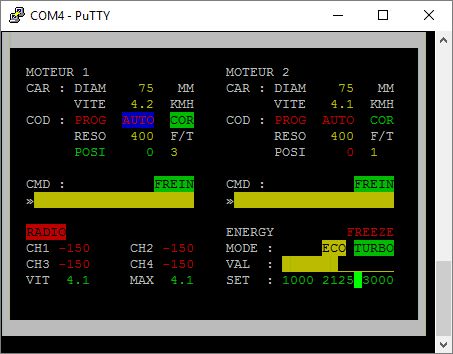
L'interface graphique d'Octocar
La logique de protection de tension est, elle aussi, toujours d'actualité, et sera normalement utilisée.