
Construction du véhicule
Objectifs de cette étape :
- Réaliser les différentes parties du véhicule,
- Enregistrer les difficultés et réponses apportées tout au long du projet.
Fabrication de la carte principale
Pour réaliser mon électronique, j'ai utilisé les logiciels suivants :
- KiCAD EDA : Logiciel libre et gratuit permettant de saisir des schémas électriques et de réaliser les PCBs correspondants
- LTSpice : Logiciel de simulation. Variation gratuite de SPICE fournie par Linear Technology.
Conception
Comme l'an dernier, l'électronique du véhicule est prévue pour être réalisée majoritairement avec des composants de surface (composants qui n'ont pas de pattes passant au travers de la carte). Cependant, je voulais revoir la conception de l'alimentation des phases de mon moteur en partant de zéro afin de bien comprendre le fonctionnement de mon montage.
Conception et simulation
Afin d'éviter les mauvaises surprises, j'ai donc réalisé un système en partant de mes transistors de puissance puis en ajoutant de l'électronique et en simulant jusqu'à ce que les résultats me semblent satisfaisants tout en gardant à l'esprit que ces simulation ne sont pas nécessairement représentatives de la réalité.

Etage d'alimentation d'une phase moteur pour simulation
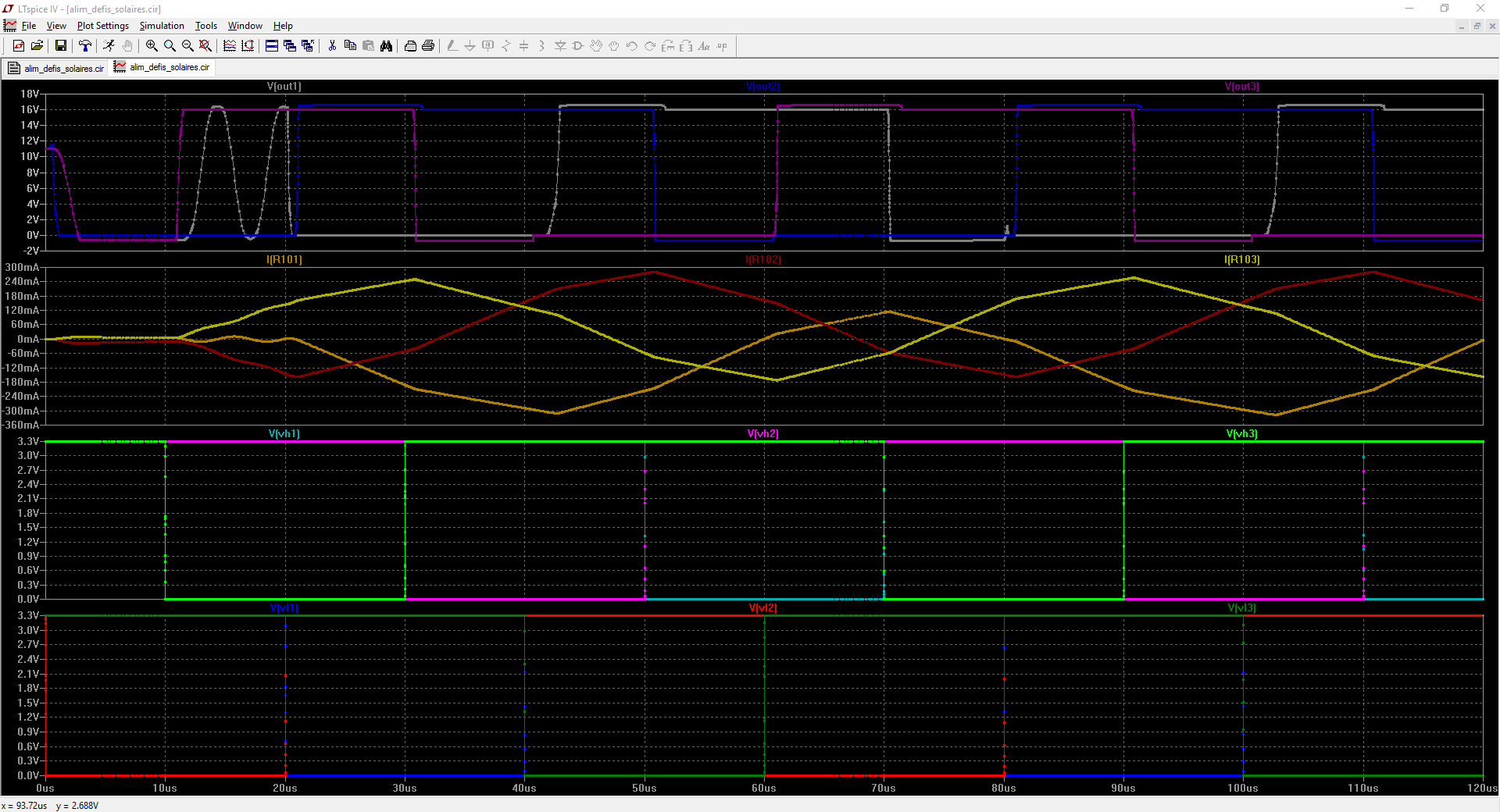
Résultats de simulation correspondants aux trois phases
Prototypage
J'ai ensuite réalisé des cartes de prototypage, en composants traversants et sans contraintes de place. L'objectif était de pouvoir vérifier mon design et, en cas de soucis, mesurer la tension sur chaque composant.
Design
Une fois le système « saisi » dans l'éditeur de KiCAD (le terme exact est « capturé »), il suffit de sélectionner les empreintes de chaque composant (Heureusement, KiCAD fournit une grande majorité de ces empreintes ainsi qu'un éditeur permettant d'ajouter ses propres empreintes.) puis de les placer et de les relier entre elles.
L’intérêt majeur d'un logiciel comme KiCAD, est le fait que les pads des empreintes sont déjà reliés afin de correspondre au schéma initial. Ainsi, il n'est pas possible de faire d'erreur dans la mesure où les symboles du schéma et les empreintes associées sont correctes. Ce sont donc quelques 173 composants et connecteurs qui ont été placés sur une carte de 188mm x 110mm.
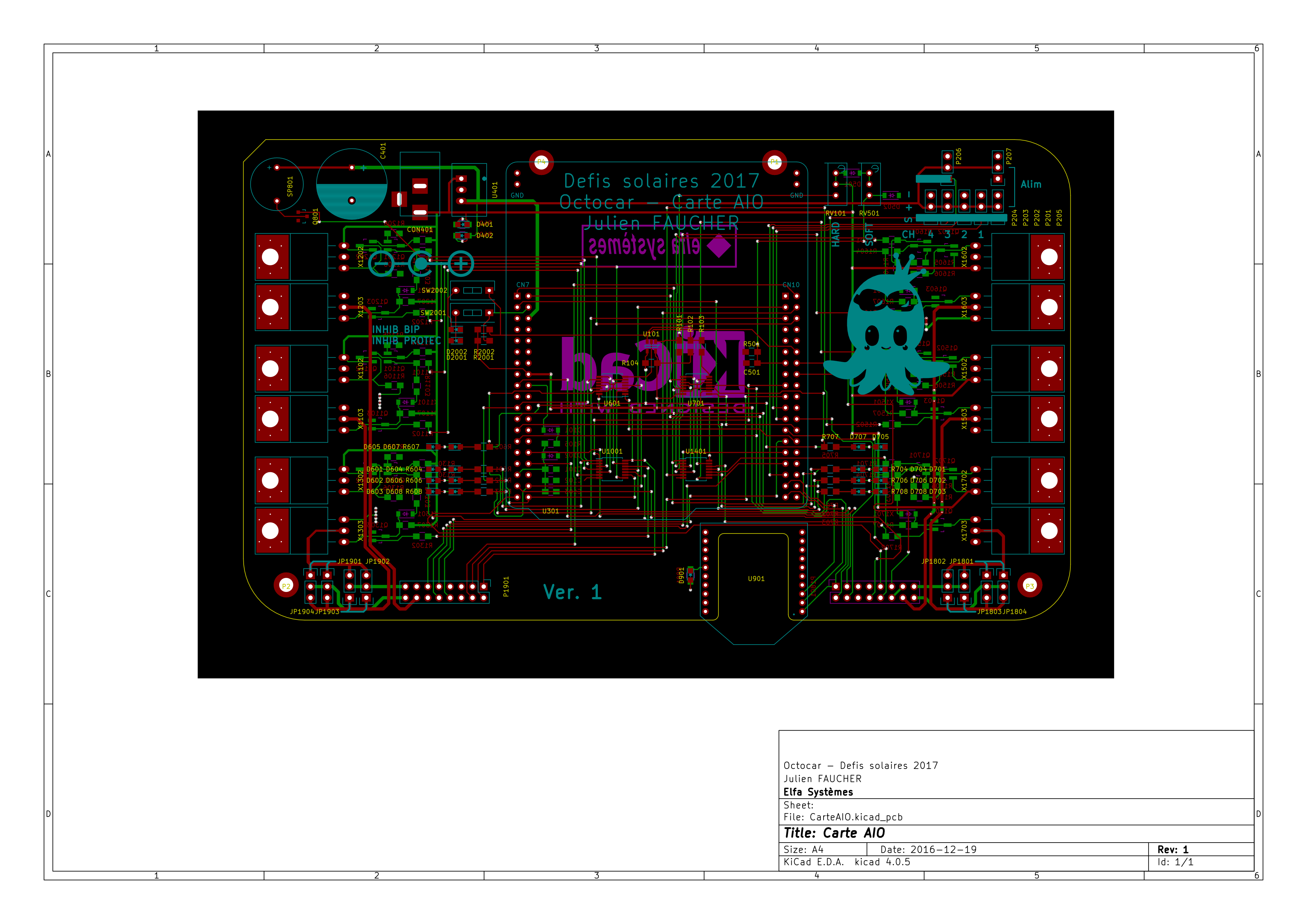
Couches principales de la carte principale
Ce travail, relativement long, m'a pris environ 2 mois…
Un fâcheux contre-temps
… et ce, malgré de nombreux contre-temps.
Vous pourrez trouver une petite vidéo montrant le procédé de routage sur le blog de l'année dernière de l'équipe.
Assemblage
Une fois le design terminé, j'ai commandé des PCBs sur un site internet. Mon fournisseur est chinois et permet la fabrication de PCBs en petites séries à très faible coût (compter 44$ pour cinq exemplaires de la carte principale plus une vingtaine d'euros de frais de port lorsque l'on est pas pressés). C'est ainsi que, 15 jours plus tard, j'ai reçu ma carte et mes composants. Il ne reste plus qu'à souder !
La soudure de l'ensemble des composants m'a pris une grosse après-midi. C'est ainsi que je suis passé de ceci :
Une carte un peu vide…
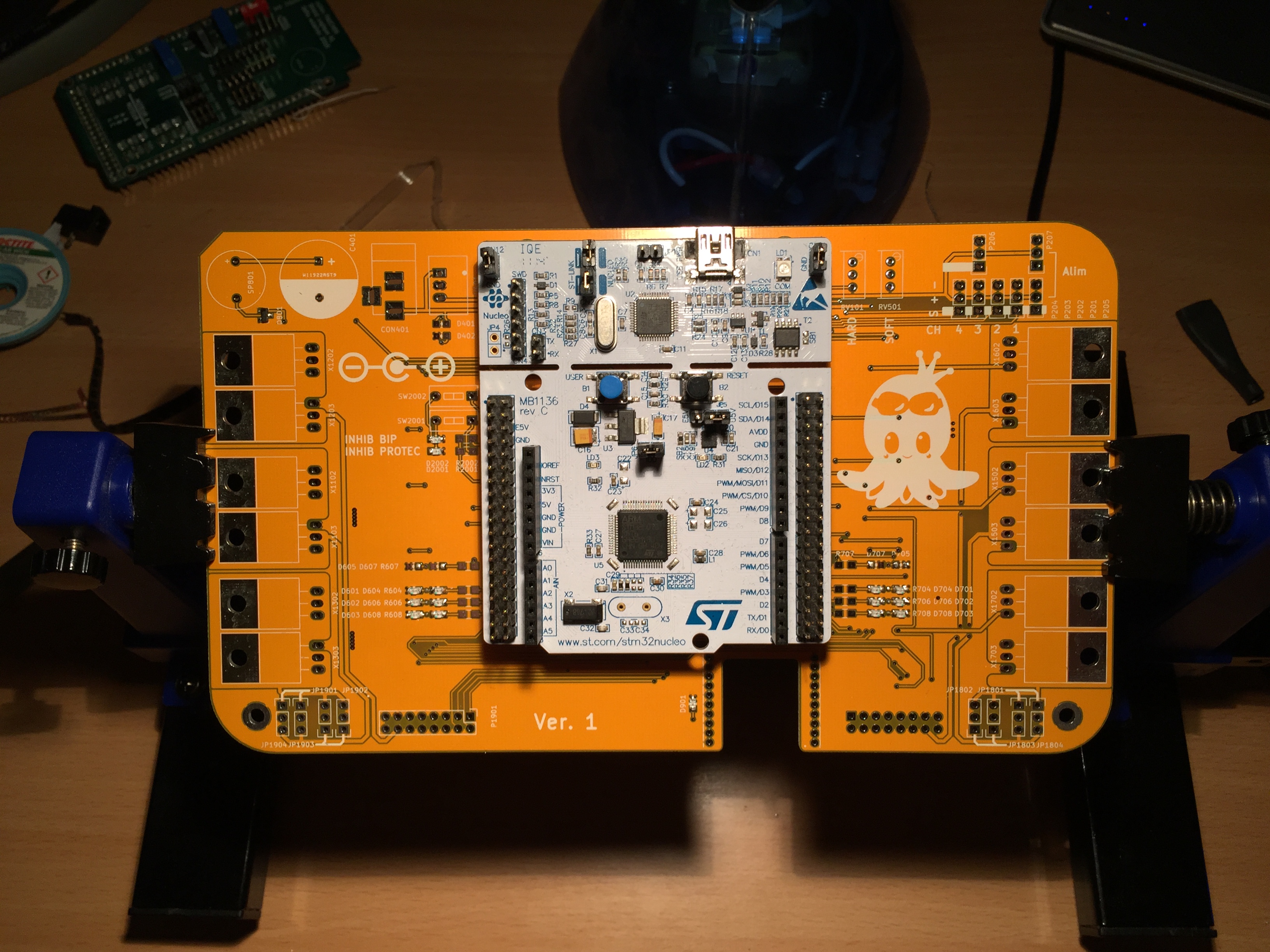
à cela :
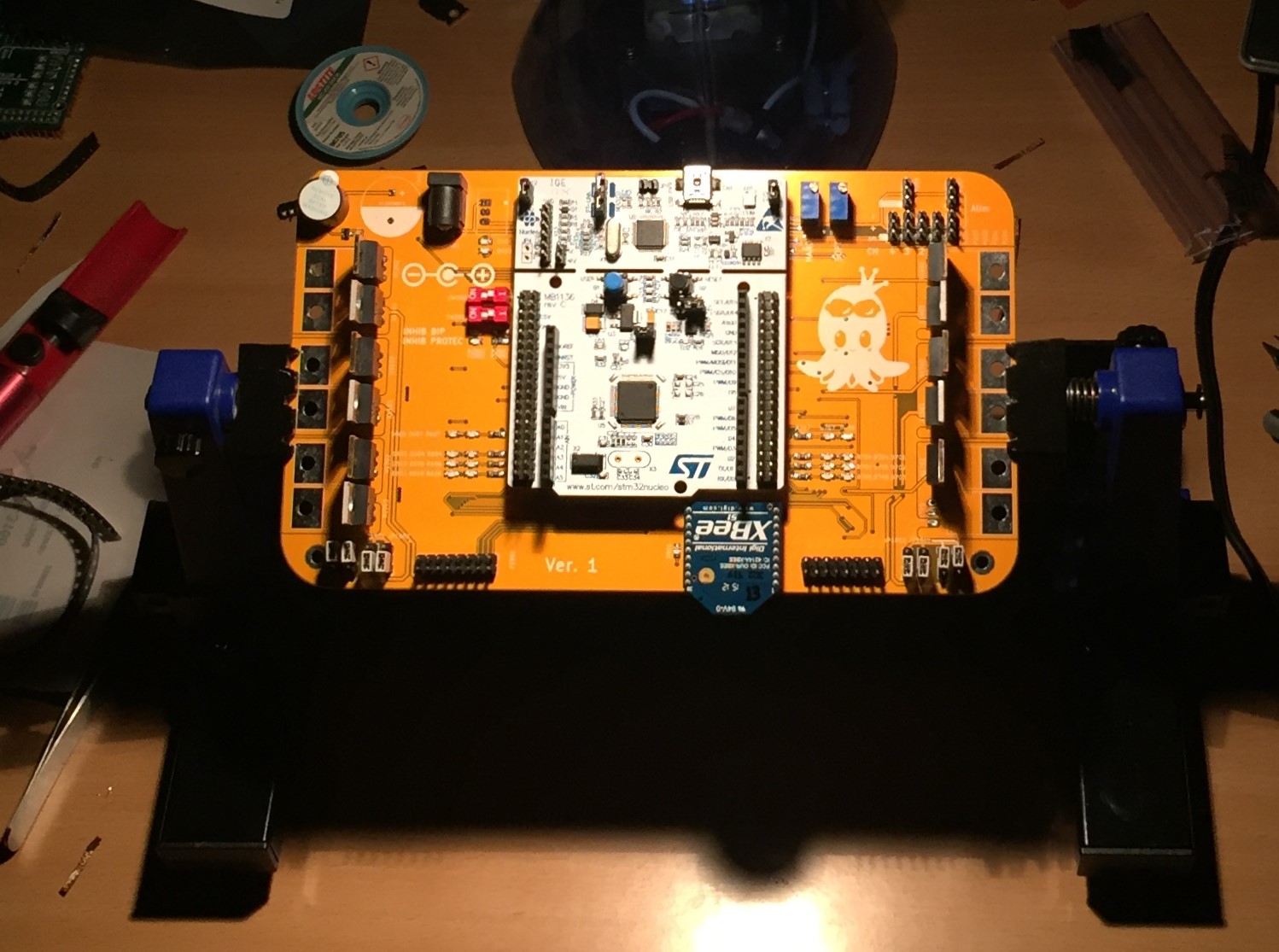
Une carte bien plus remplie, mais le gros du travail est au verso 😉
Je tiens à préciser que ce travail a été entièrement réalisé avec un fer à souder classique, une panne « tournevis » de 1,2mm, et de la brasure sans plomb.
La carte blanche est une STM32-F072 Nucleo, distribuée par STMicroelectronics. C'est une alternative à bas coût, hautes performances et faible consommation à une Arduino méga. Elle n'est pas soudée sur la carte principale mais enfichée.
Difficultés rencontrées
Lors des premiers tests, j'ai pu constater que ce design ne peut pas être testé correctement sans deux des 3 étages d'alimentation (Alim principale env.12V, et 3.3V produit par la STM). Heureusement, j'ai pu accéder à des pins normalement liés au 3.3V afin de remédier à ce problème.
Il n’empêche que le fait d'avoir des pins flottant nuit gravement aux possibilités de tests. Il faudra corriger ça sur une éventuelle prochaine version via l'emploi de résistances de pull-up (ou pull-down) de fortes valeurs.
J'ai eu aussi de gros soucis à cause d'une lecture trop superficielle des différentes documentations de ma STM. Deux pins utilisés pour la commande des moteurs sont en fait utilisés pour la RTC (horloge temps réel) de la STM. Il m'a fallu modifier légèrement celle-ci (heureusement, ces modifications sont prévues).
Enfin, la dernière difficulté en date est l'ajustement de la commande des moteurs. Il m'a en fait suffit de régler correctement mes codeurs afin d'obtenir un calcul plus simple et plus précis. J'obtiens ainsi une vitesse supposée de 24km/h .
Point de vue global
Sur l'ensemble, je suis plutôt fier de ne pas avoir eu de soucis majeurs (mauvais mapping, comme l'année dernière) et d'avoir réalisé une carte fonctionnelle quasiment sans accrocs. Il ne reste plus qu'à tout tester !

Voiture montée et fonctionnelle